










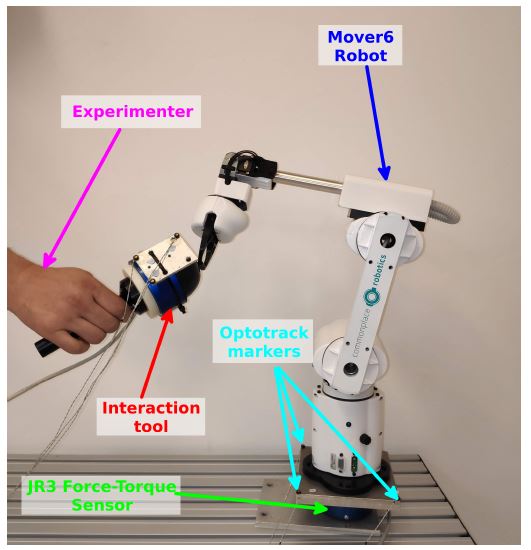
Research group uses 3 laboratories: Laboratory for biomechanics, automatics and systems, Laboratory for expert systems, machine learning and image processing and Laboratory for distributed systems and software engineering. Labs are equipped with various devices for measurements in biomechanics (force plate, EMG, inertial sensors XSens) and image acquisition (camcorders, 3D cameras, high-speed cameras, …), as well as other devices for signal acquisition (sensor glove, accelerometers, Kinect). Also, labs are equipped with several UAVs, mobile robotic platforms (BlueROV2, Leo Rover, Mover6) , robotics sets (Arduino, NXT Mindstorm, Turtlebot) and several types of embedded computers.
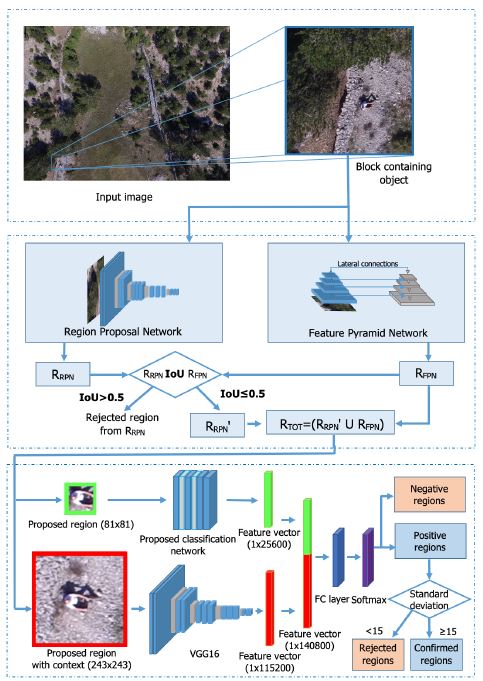
Research activities are including development of system for border control and search for humans based on aerial image analysis as well as development of computer vision algorithms for robust tracking/detection of humans and objects. These algorithms can be applied in various applications of outdoor and indoor space surveillance and analysis of sports events.
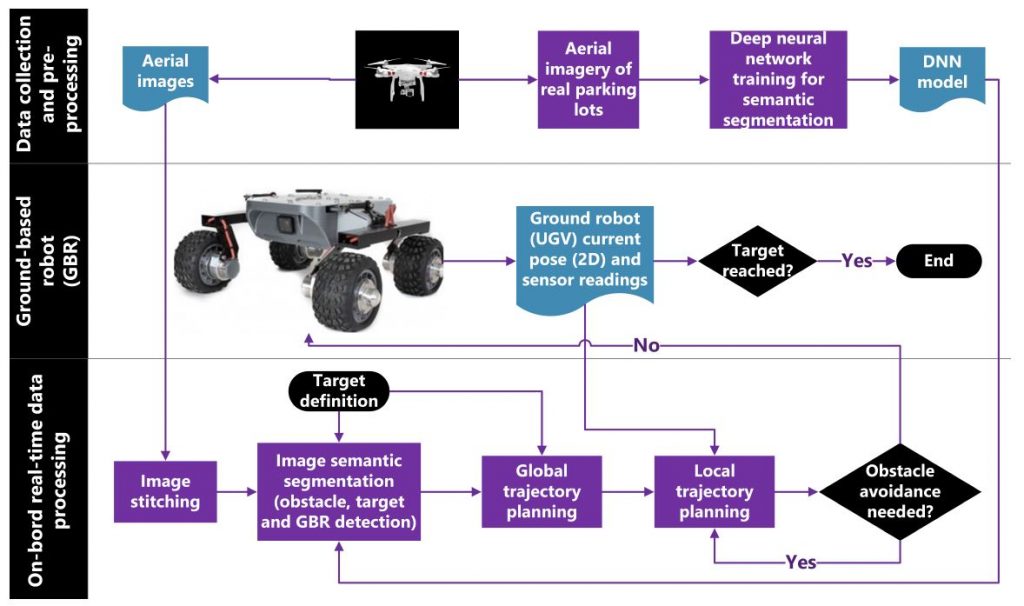
Realisation of described system is conducted as extension of research conducted within EU project iSPIS (in collaboration with company Statim d.o.o.), that started on 01.11.2017. Also, a bilateral project SmartBots (Croatia and Germany – main researcher Vladan Papić) is ongoing. Research is focused on autonomous control of mobile robots based on implementation of computer vision and deep neural networks.
For improvement of medical procedures (operations and diagnosis), research of multiple visual contents fusion based on rendering of processed data and alignment with real world objects in augmented reality is planned. (I. Zoraja).
For successful implementation of planned tasks within this projects research focus is within following areas: digital image processing, robotics, machine learning (recognition and classification), design of knowledge based systems. Special attention is also on development and implementation of new, intelligent systems that are using deep neural networks for object detection, recognition and classification and producing correct decisions in unknown environments. More intensive research using underwater drones as well as multi robot collaboration is expected in the future.
(2021)
(2020)
(…)
 Facebook
Facebook